以Livox Mid-40为例:
")
软件依赖:ubuntu 16.04、ROS、Livox-SDK、Livox_ROS_driver(此部分驱动的下载和安装详细过程见 )
硬件部分:Livox-Mid 40 × 1、电源转接插座2.0或连接盒 × 1、以太网线(百兆或千兆) × 1、PC × 1
连接:物理连接如下图所示
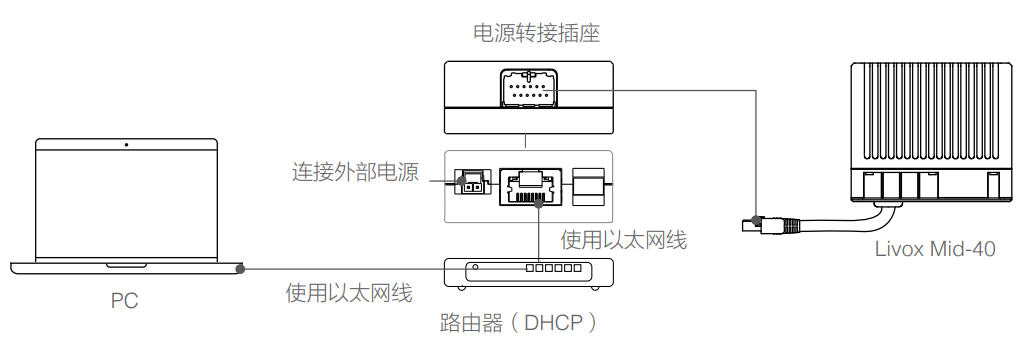
若对连线及IP配置存在疑问,可参考Livox官网Livox觅道Mid用户手册“连线”部分,下载地址如下
采集:
首先确认已从Git克隆Livox-SDK
完成Lidar硬件及IP配置部分,在以下文件路径下打开终端窗口:
执行以下命令连接Lidar,并设定记录的点云数据的持续时间为10s:
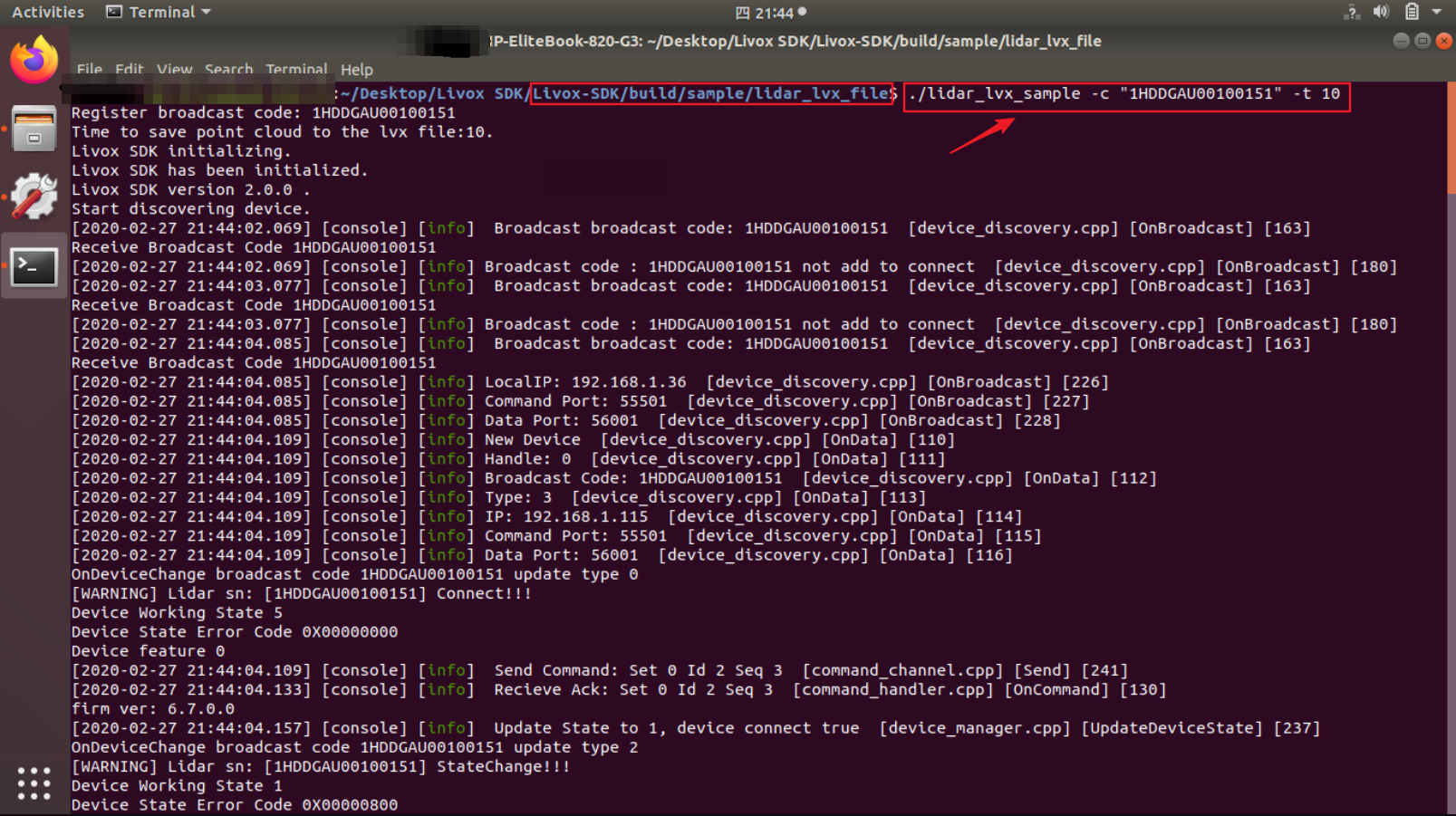
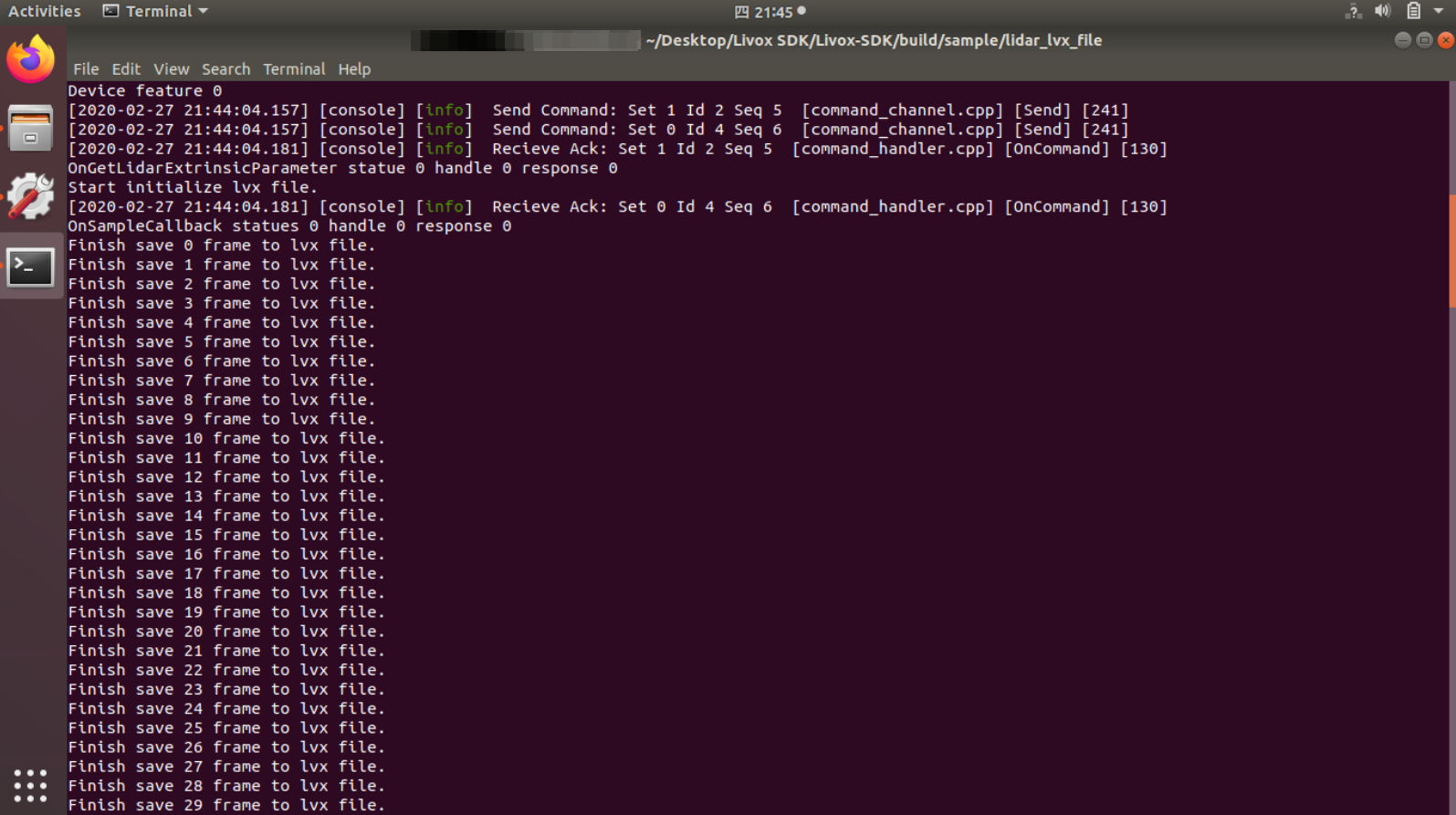
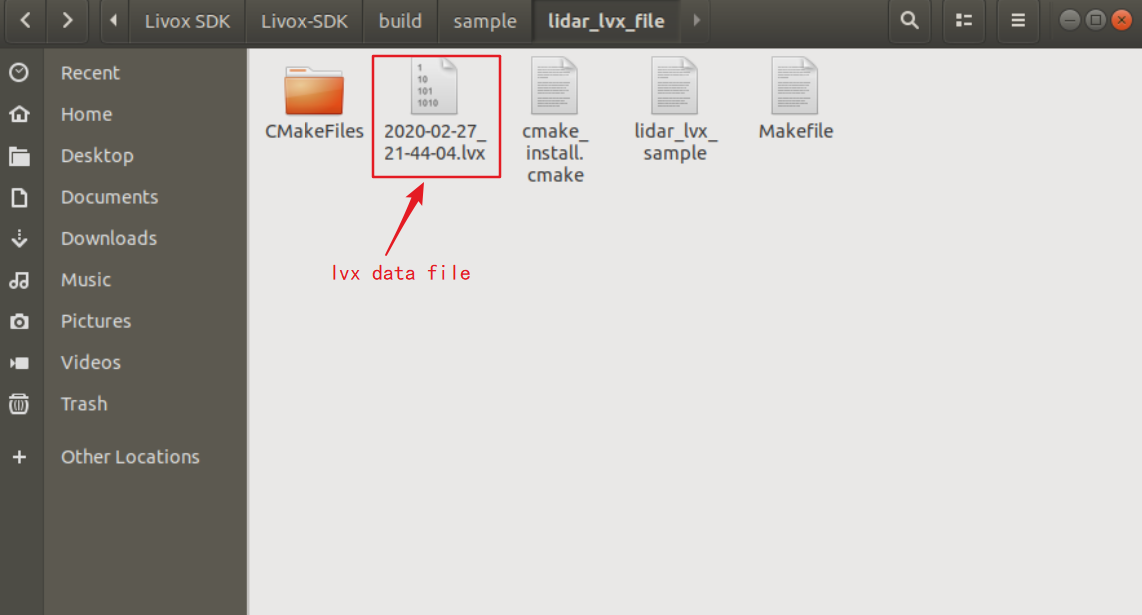
成功执行后,当前路径下即可生成采集好的lvx文件
1.连接好雷达后,在livox_ros_driver所在工作空间打开终端编译并更新当前ROS包环境:
2.使用ROS launch文件加载览沃ROS驱动:
3.启动rviz并显示雷达画面后,使用record命令记录数据:
